哈工大研发微小型两栖机器人,基于振动驱动原理
发布时间:2022-10-14 09:55:38 【来源:机器人大讲堂】
由于需要同时具备不同环境下的运动能力,现有两栖机器人大多将传统地面和水下驱动方式相结合,配备多套驱动系统。这种方案不但容易继承原有驱动方式的缺陷,而且复杂的传动和切换机构也会导致机器人的控制困难、结构复杂,难以实现两栖机器人的微小型化。
针对这一难题,哈工大机器人技术与系统国家重点实验室近期研发了一种基于振动驱动原理的微小型两栖机器人。该机器人通过刚柔复合模块的振动激励实现两栖运动,在地面和水面分别采用椭圆摩擦驱动和振动致流驱动方案,实现了地面奔跑运动和水面快速游动;通过无传动的结构设计,实现了两栖机器人的集成化和微小型化;其运动场景如图1所示。
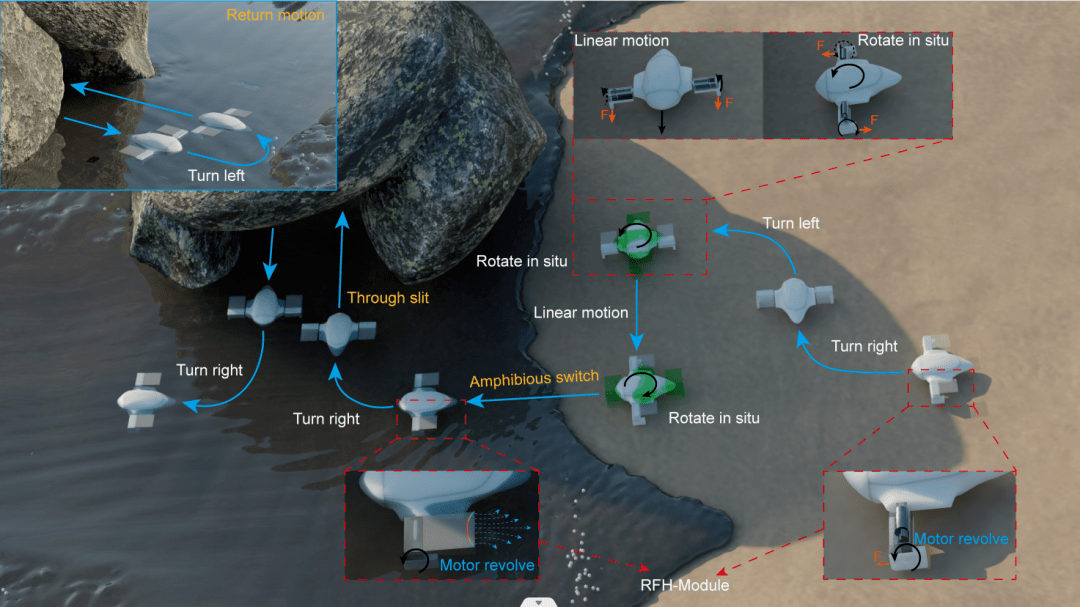
图1 | 振动驱动微小型两栖机器人运动场景两栖机器人的整体尺寸约为75mm×95mm×21mm,如图2所示;机器人的所有结构部件均通过3D打印制成,总重量仅35g。
该机器人由一个主体结构和两个驱动模块构成,主体结构设计为流线型,以减少机器人在水中的运动阻力。两侧的驱动模块采用刚柔复合设计,包括一个传动腿和两个驱动部件,通过内部偏心电机激发振动;其中传动腿采用刚性设计,以实现振动从电机到驱动部件的快速传导以及振幅的放大;在传动腿底部布置EVA泡棉材质的弹性足,通过足地摩擦冲击产生驱动,同时可避免足地间高频刚性接触,减少振动对驱动模块的损害,提高运动稳定性;在刚性传动腿的顶部布置PVC材质的柔性鳍,通过振动激励下的变形产生射流,从而获得机器人的水面驱动力。

图2 | 机器人整体尺寸和详细结构该机器人采用椭圆摩擦原理来实现地面运动。在偏心电机产生的离心力作用下,驱动模块以椭圆轨迹振动,如图3a所示,此时偏心电机逆时针旋转,弹性足呈现为逆时针的椭圆振动。
在椭圆轨迹的下半部分,弹性足下压,最大静摩擦力增加,同时驱动模块相对于地面向右移动,从而产生向左的摩擦驱动;在椭圆轨迹的上半部分,驱动模块离开地面,而整个模块由于惯性继续向前运动。
因此,弹性足每次与地面接触时,都会受到摩擦冲击的作用,从而实现连续运动。通过两侧驱动模块的配合,机器人可以在地面实现各种形式的灵活运动:两个驱动模块以相同的方向交替振动,可实现双足的直线奔跑;通过两个驱动模块间的差速可实现旋转运动;而当两个驱动模块以相反的方向振动时,则可以实现原地旋转。
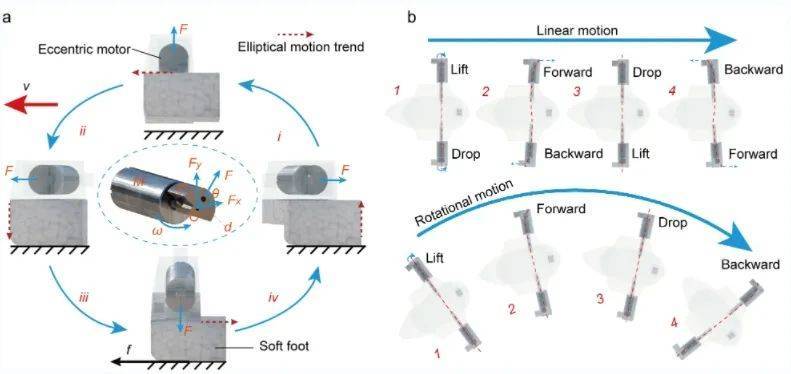
图3 | 地面摩擦驱动机理该机器人采用振动致流机制来实现水面运动。当柔性薄板在水面振动时会产生明显的变形,而不同的激励频率会激发出不同的振动模态,从而导致表面流场出现复杂的变化,如图4a所示。
该项研究针对不同振动模态对表面流场变化的影响规律进行了深入探究,根据实验和理论分析,一阶模态下振幅较小,末端水流微弱,难以产生驱动效果;而在二阶模态附近,在柔性薄板末端会出现横向流动;在三阶模态下,柔性薄板末端中间的变形比两侧的变形大,可以在较高电压下、较宽的频率范围内有效汇聚水流,如图4b所示。
水流将从端部两侧的节点向中间汇聚,从而克服表面张力的限制,出现明显向外的射流,实现机器人的水面推动。

图4 | 机器人的水面驱动原理最后对该机器人的两栖运动能力进行了测试,机器人的地面运动如图5所示:
图5 | 机器人地面的直线和旋转运动机器人的水面运动如图6所示:

图6 | 机器人的水面直线和旋转运动机器人的两栖切换运动如图7所示:
图7 | 机器人的两栖切换运动该两栖机器人的地面运动速度达到815 mm/s,相对速度约10.9 BL/s;水面运动速度达171 mm/s,相对速度约为2.3 BL/s;该机器人成功实现了两栖切换运动,且在两栖环境中的相对运动速度优于当前大多数的两栖机器人。
此外该机器人还成功实现了地面越障运动、水面倾覆后运动等,如图7所示,展示出了良好的运动环境适应性。

图8 | 机器人的越障运动综上所述,该项研究工作提出了一种基于振动驱动原理的微小型两栖机器人。机器人以独特的刚柔复合模块作为两栖运动的核心部件,采用偏心电机作为核心驱动单元,激励弹性足和柔性鳍分别实现地面奔跑和水面游动。机器人地面运动采用双足椭圆摩擦驱动机制,通过偏心电机在弹性足上激发出椭圆振动,通过双足交替与地面之间产生摩擦冲击实现在地面上的奔跑运动;同时还解释了由惯性驱动机制引起的两种地面运动机理切换所产生的特殊实验现象。
对于水面运动,通过研究柔性薄板的水面振动致流机制,阐明了振动模态对表面流场的影响规律,并证明了第三阶振动模态具有最好的驱动效果,从而提出了一种基于振动的水面射流驱动方案。
由于振动驱动原理无需额外的传动机构,该两栖机器人采用此刚柔复合模块驱动,易于实现小型化和密封设计;此外,机器人实现了控制系统的集成,通过两侧驱动模块的配合实现了两栖环境中多种模式的自由运动,并展示出了优越的运动性能和较好的环境适应性。这项工作有效地解决了现有两栖机器人结构复杂、难以小型化的问题,在各种复杂的两栖环境中表现出广阔的应用前景;而创新的两栖运动机制将为后续微型两栖机器人的研究提供一个切实可行的方向,机器人所采用的刚柔复合和无传动设计理念也可以为研究人员带来新的启发。
相关成果以“Miniature amphibious robot actuated by rigid-flexible hybrid vibration modules“为题发表在Advanced Science上,博士生王德鸿、刘英想教授和博士后邓杰为论文共同第一作者,刘英想教授和赵杰教授为论文共同通讯作者。
论文链接:
https://onlinelibrary.wiley.com/doi/10.1002/advs.202203054.
作者 | Robospeak
排版 | 麦子










哈工大研发微小型两栖机器人,基于振动驱动原理
两栖机器人以其优异的环境适应性,在信息监测、环境侦察、资源勘探以及灾害救援等方面表现出独特的优势,一直以来都是机器人技术领域的热点方向。...
预制菜+外卖,餐饮机器人有了更多“用武之地”
预制菜+外卖让餐饮机器人有了更多用武之地。...
周大福17916系列 | 主打22k金材质 有你陪伴「一起走一路」
2022年9月16日,22K金时尚首饰——周大福17916系列迎来了它的第五个周年,在五周年之际以「一起走一路·与你同游这世界」为主题概念,以爱与陪伴启程对于世界的全新探索与感知。...
CRD克徕帝 | 30年先锋探寻 跨世纪艺术珠宝品牌 谱写华彩篇章
2022年9月21日,大师级艺术珠宝品牌CRD克徕帝正式官宣,实力派男演员张若昀成为首位CRD品牌代言人。...
入秋钻饰珠宝搭配:适合自己的才更出彩!
很多喜爱钻饰的姑娘都会觉得,夏季是佩戴钻饰的最好时节,胸前皮肤露出的部分可以更好地突显出美钻的迷人光彩,羡煞旁人。...
PIAGET伯爵 | 不羁妙趣 Solstice 至日华彩高级珠宝与腕表系列
PIAGET伯爵Solstice至日华彩高级珠宝与腕表系列灵感源于一年之中最为特别的“至日”之夜。...



- Copyright © 2013-2020 All rights reserved
- 联系我们 QQ: 3 38 52 5 5 3 9 0