“变形机器龟”登上Nature封面:模仿生物机理,为机器人带来更多可能
发布时间:2022-10-16 07:58:33 【来源:智东西】

编译 | 曹玉蓓
编辑 | Panken
智东西10月13日消息,今日,美国耶鲁大学研发的两栖机器龟(ART)登上了国际学术顶刊Nature的封面。该研究从生物世界中汲取灵感,设计出了能同时在陆地和水域实现轻松导航的机器龟。
▲Nature论文封面图
论文链接:https://www.nature.com/articles/s41586-022-05188-w
海龟有脚蹼,擅长游泳;陆龟有圆腿,可在走路时承重。此项研究提出的“自适应形态发生”设计策略,使得两栖机器龟可以改变其四肢形态和步态,以应对不同的环境。
这一设计思路,有望进入生物监测、灾难响应、安全等实际应用中,同时可用于研究动物运动。
一、灵感来自进化超亿年的海龟和陆龟
生物进化过程是通过进化更完善的遗传程序,从而为动物提供了身体形状,使它们能够在其主要类型的栖息地有效地移动。但这些适应性往往以在其他环境中的低效表现为代价。
同样,当工程师设计移动机器人时,他们也倾向于在单一操作环境的基础上选择设备的结构和行为。其结果是固定的结构和行为,在一个环境中表现出色,但却影响了机器人适应其他环境的能力。
目前,移动机器人的普及跨越生态监测、仓库管理和极端环境探索,到个人消费者的家中。这种不断扩大的应用前沿要求机器人在多个环境中运行,这是传统机器人设计策略尚未有效解决的重大挑战。
在不同环境中,机器人遇到的移动挑战也不相同。为了让机器人能好地适应不同环境,Rebecca Kramer-Bottiglio教授课题组从陆龟和海龟中汲取灵感,构建了一个机器龟,它融合了传统的刚性部件和软材料,从根本上增强了其四肢的形状并改变了其步态以适应多环境运动。

▲机器龟与海龟游泳对比
二、变形机器龟来了!陆地、水中移动效率都很高
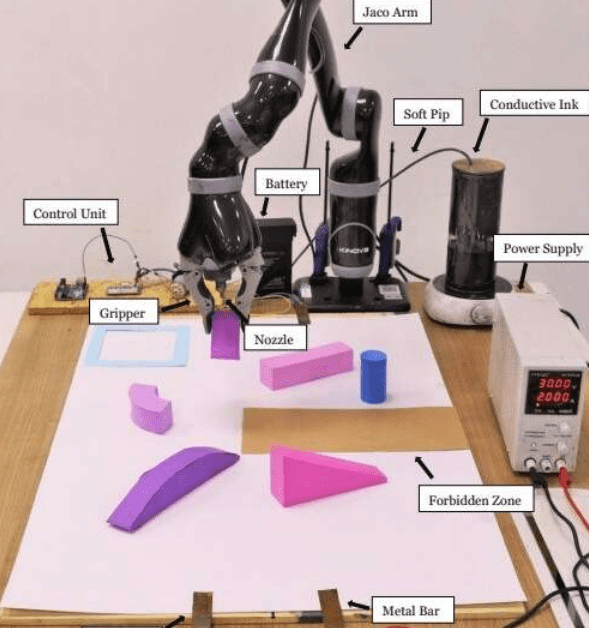
机器龟的身体有一个变形肢体,能够根据环境调整其硬度和形状。身体包括四个子系统:底盘、外壳、肩关节和变形肢体。底盘容纳电子元件,外壳提供流线型、用于浮力调整的压载空间、有效载荷存储和保护。肩部关节在运动学配置中各有三个马达,以实现一系列的步态。

▲系统描述:机器人组成部分
由一对简单的气动执行器组成的变形肢体,与粘附在热固性聚合物上的应变限制层连接到每个肩关节。通过嵌入的加热器加热热固性材料使其软化,并给气动推杆充气,使肢体的横截面积和硬度发生变化。这些变化使机器龟的肢体能够在有利于行走的圆柱形几何形状和有利于游泳的平鳍几何形状之间进行适应性变形。
在水中测试时,机器龟的浮力可调整为表面和水下游泳。随着四肢变形为脚蹼模式,研究者研究了划水和拍打运动。划水步态是一个相对于机器人身体向后的划水动作,随后是一个向前和向背的羽化恢复动作;拍打步态的特点是由连续的上冲和下冲组成的垂直运动轮廓。
机器龟结合了海龟和陆龟的特点,具有了可变形的四肢,能够根据周围环境调整四肢形状、刚度和动作。当将机器龟从一种环境过渡到另一种环境时,其四肢使用可变刚度材料和人造肌肉来改变其形状。机器龟具有灵活的四肢:
▲前肢变形过程:再次加热到50W,从腿状变回鳍状模式
三、未来或可用于监测海洋生态系统
机器龟融合了传统的刚性部件和软材料,从根本上增强了其四肢的形状并改变了其步态以适应多环境运动。

▲机器龟拍打着双鳍在水中游泳
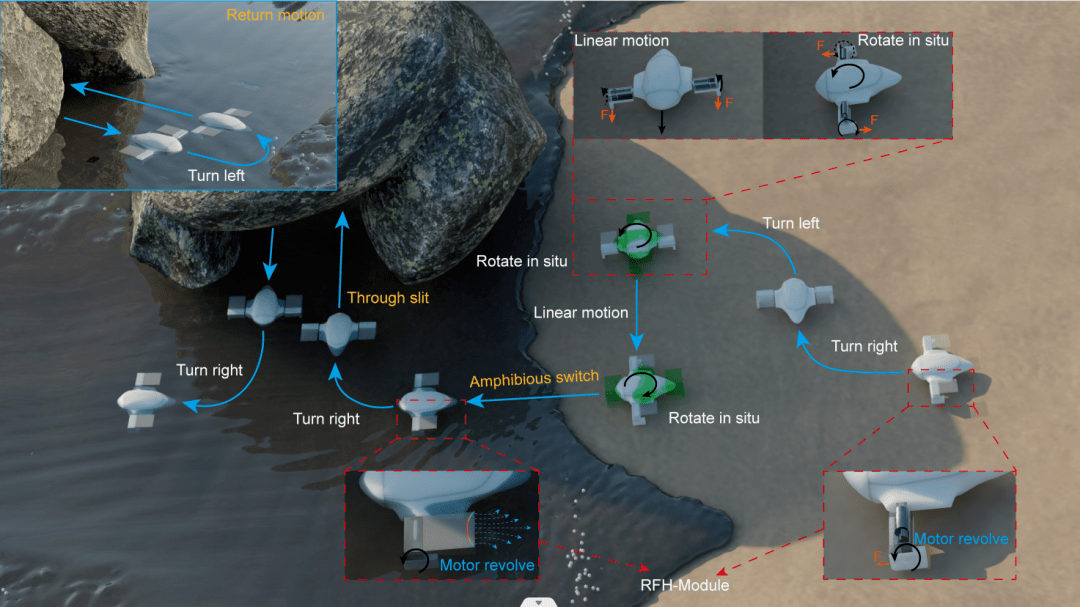
机器龟使用腿部模式和匍匐前进的方式来穿越坚硬的土壤部分。当机器龟接近水面时,基质变得更加饱和,它开始爬行,以确保稳定性,防止直立步态的集中点负荷深入到基质中。机器龟并没有在开阔的水面上走很远,在变形之前,它把四肢抬出水面。当它在浅水区仅部分被淹没时,它依靠划水来游泳。到达水域后,机器龟就将腿变成鳍状肢,使其能够以基于升力和阻力的水上步态进行畅游。

▲机器龟从陆地爬到水里:为了在移动过程中变形,研究团队设计机器龟将四肢抬出水面
步态、肢体形状和环境介质的相互作用揭示了控制机器人运动成本的重要参数。结果证明,自适应形态发生是提高移动机器人遇到非结构化、不断变化的环境的效率的有力方法。
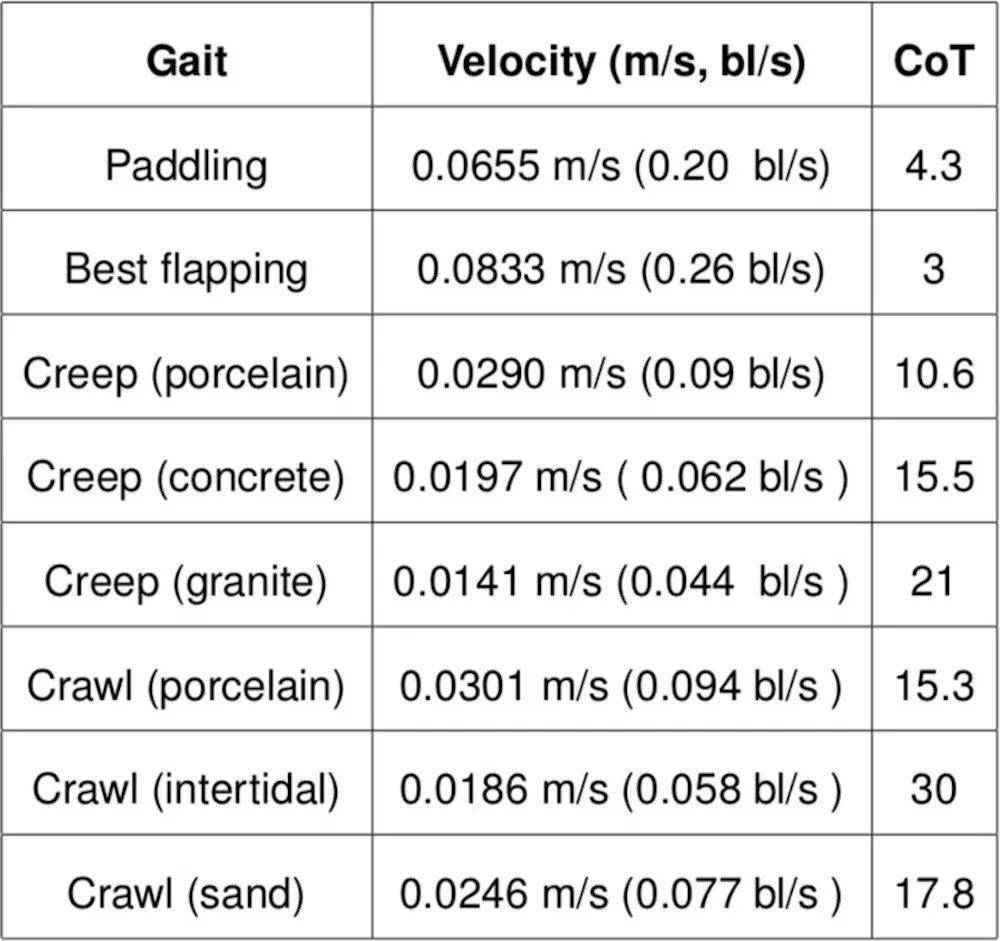
▲机器人所有步态的速度和CoT
根据耶鲁大学团队博客里的详细描述,机器龟未来潜在的应用方向有很多。Rebecca Kramer-Bottiglio的实验室专注于包括监测海岸线生态系统、潜水员助手和海洋养殖等应用。机器龟还将帮助研究人员研究海洋中复杂冲浪区的运动物理学,那里的波浪、电流和浊度使一些机器设备的导航失灵。
结语:模仿生物机理,为机器人带来更多可能
从大自然汲取设计灵感在机器人研究中已经很常见,科学家通过这种方式研发了很多不同类型的仿生机器人,比如今年日本研发的蟑螂机器人,加州大学圣地亚哥分校的研究团队研发出来的藻类-纳米颗粒混合微型机器人等。
耶鲁大学团队的这项新研究,为研发能够适应多样化环境的下一代自主系统提供了新思路,即通过动态调整形态,在不同环境中实现最佳的行动性能。
不过截至现在,很多仿生机器人还处于研究或初步试验阶段,距离真正的大规模量产应用及普及,还有较长的路要走。
来源:Nature、NewScientist









“变形机器龟”登上Nature封面:模仿生物机理,为机器人带来更多可能
美国耶鲁大学研发的两栖机器龟(ART)登上了国际学术顶刊Nature的封面。...
全面贯彻智慧养老发展路线,养老机器人面临的机遇与挑战有哪些?
2022年,中国老年人数已经增加明显,有预估认为,至“十四五”期末,老年人口将突破三亿人。...
高珠 BOTANICA | 与繁花锦簇生动共鸣,感受蒂芙尼植物美学的璀璨历程
2022年10月,世界著名珠宝品牌Tiffany & Co 蒂芙尼正式发布2022 Blue Book高级珠宝系列BOTANICA植物绮境秋季新作。...
初投超4亿!波士顿动力AI研究所启动,要打一场“机器人”长期仗
近日,现代汽车集团和波士顿动力宣布初始投资超过4亿美元,启动新的波士顿动力人工智能研究所...
BVLGARI「Divas’ Dream」系列 扇形挂坠可转手链佩戴 搭配不同场合佩戴需求
BVLGARI推出「Divas’ Dream」系列的新一季作品,依然延续品牌标志性的「扇形」元素。...
磁力驱动齿轮箱,让机器人更自由
马克斯·普朗克研究所和哈工大合作的最新研究成果,解决了微型机器人多年的难题。 ...




- Copyright © 2013-2020 All rights reserved
- 联系我们 QQ: 3 38 52 5 5 3 9 0